
Radar speedometer
Principles of radar speedometer
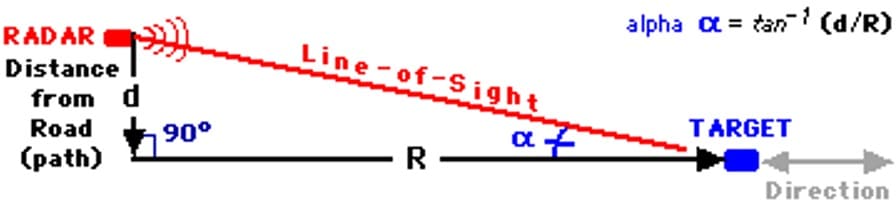
Principles of radar speed measuring system are based on a well-known phenomenon in the world of waves, if the reflecting surface of a wave is near or far from the wave source a change will occur at the frequency of electromagnetic wave reflection. In fact, each of the radars has a wave source and the receiver or receivers that have produced the source of electromagnetic wave (mainly at a frequency of 24 GHz in traffic radars) and the wave is emitted in the environment and its reflection is received by the receiver of vehicles. Minor difference in the sent and received frequency indicates the moving speed in the scene.

In a general classification radars are divided into two categories: pulsed and continuous wave radar. In pulsed radars waves emitted from wave source are sent and received as single and modulated waves.
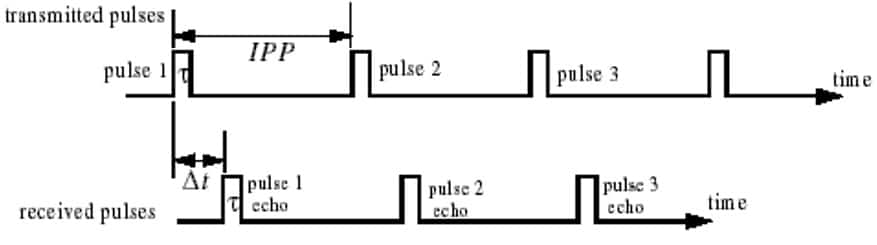
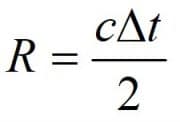
So measuring the distance of the target is done by getting time delay between sent and received pulses and taking into account the speed of light.
Meanwhile speed is extracted through Doppler equation and using the Doppler filter bank in this radar.
But in continuous wave radar, the wave source creates a stable sinusoidal signal and sends it constantly until the needed power is supplied, and its reflection is received by a separate antenna. In the simplest case, continuous wave radar can only determine the speed of the target, using the Doppler Effect. But in order to create the ability to measure the distance of the target, we can use different frequency modulations. For example, we can use linear frequency modulation (triangular) or sinusoidal. It is possible to reveal the distance without modulation, using two frequencies close to each other in the form of two sinus waves. Related technical discussion is out of the scope of this subject.
Traffic radars based on application are divided into the following three categories:
- First generation is able to only detect the speed and distance of a moving target.
- Second generation are able to detect the speed and distance of several moving targets.
- Third generation these radars are capable of detecting targets at different angles and also are capable to detect speed, distance and angle of several stationary and mobile targets.
Radar-based speedometer cameras
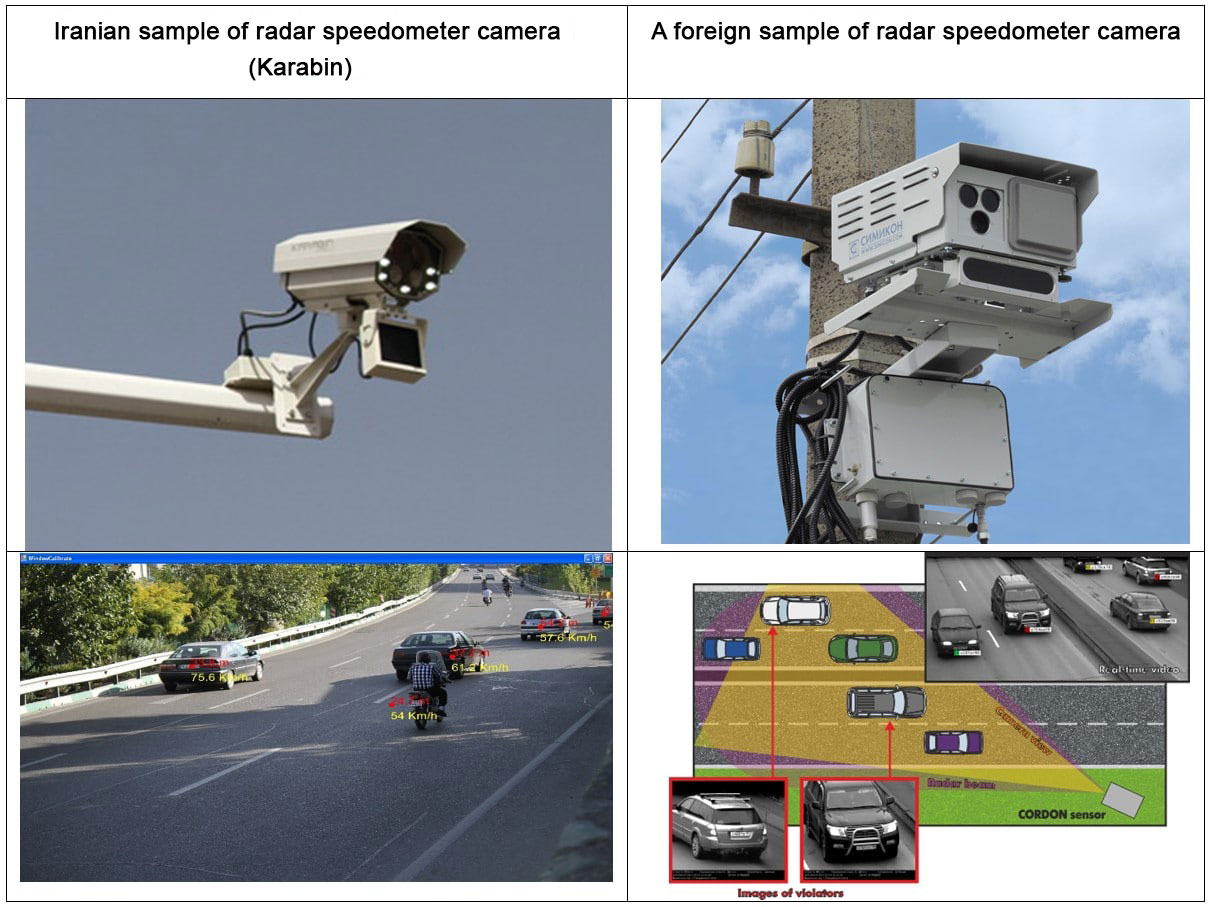
As it was said at the beginning of this article it is intended here to examine the fundamental differences between the technologies used in traffic enforcement cameras and we do not consider the use of non-normative modules in the system. Thus, any system using radar modules, in fact, is not a radar speedometer system. A common erroneous process in violation detection systems is to use radar as the trigger of the camera (specifically photography camera). Due to pervasiveness of this process (especially in Iran) and also the difference in performance of these systems and a real radar system, we will study it here with more details.
Some speedometer cameras use a single target radar system that has the ability to detect the fastest car in the scene and report it as output. If the reported speed was over the speed limit threshold (for example 120 km/h), imaging camera (commonly photograph camera) will be activated and at least two photographs are taken from the scene. It is worth mentioning that coverage angle of the radar is not considered and it may cover several lines (so called multiple lanes). This process can work flawlessly until only one car is present in the image. So the taken picture is related to the offended car. But what if several vehicles are involved in the scene? Now how are we going to establish a correspondence between reported speed and the offender vehicle? These systems exploit image processing in this kind of situation. Through reading the license plates in both pictures and calculating the speed for each car, at the end there will be a list of rough values for each vehicle’s speed. System matches the speediest car in the list to the reported value and the rest values will be based on LPR image processing.

An example of multiple lane radar sensors, first generation.
With a close look at this structure, serious problems will be revealed:
Necessity of reading all the license plates in the frame and low rate of violence records
If there are more than one car in the scene, necessarily all the license plates must be read in both frames. Because missing only one license plate in any one of the two images leads to inability in creating the list of rough values. Consequently, system will not be able to determine the offender vehicle. In this case, the output of the system won’t be other than either missing the offender vehicle or reporting the velocities only based on LPR image processing. It should be noted that in the systems using mono-cam LPR technologies studied in the first section of this article, in case of a plate not being read will result in missing just that vehicle. But in the radar systems as we saw in the same situation it is impossible for the system to make the correspondence between reported speed and the offending vehicle. Using photography camera in most of the systems based on this method exacerbates the problem. Having lower image quality compared to traffic specific cameras systems using photography cameras will have less LPR ability. Thus, because of depending to correct performance of the system on LPR process, final performance quality of the system will decrease. As a practical experience, photography cameras focus with noticeably less speed in bad weather conditions (mist and rain on the glass of the system). The experience of using this kind of system in our country confirms the fact that in bad weather conditions, performance of the mentioned systems decreases too much. If the speed threshold has been set such that many vehicles violate the speed limit successively in a short time, photography cameras won’t be able to shoot all of them as fast as it is required, also after a number of images taken their buffer will get filled and the camera can’t take more pictures before transferring them to a computer.
Being limited to LPR based speedometer accuracy
LPR based speedometer was discussed in details in the beginning chapter. Calculations showed that it has fundamentally high amount of case error. Now let’s consider in so-called radar system studying in this section, a value has been declared as the highest speed in the scene and also a list of speeds guessed by image processing has been provided. Now that we are going to correspond the top of the guessed speed list to radars reported value we must be careful that the error in LPR speedometer might have changed the first place in the list and if so, we will end up penalizing a guiltless driver! In other words, although instant radar speedometer comes with high accuracy, but in multiple vehicles situation for which the first generation of modules only declare one speed and there is the need to relate this value to one of the cars in the scene, systems accuracy will be limited to the LPR speedometer’s accuracy. So the intrinsic worthiness of the radar system in situations with multiple cars having speeds near to each other will be wasted. For example, suppose there are two vehicles, one with speed of 123 km/h and the other having speed of 118 km/h. first one is clearly violating the speed limit, while the second one is not. Now by an error of only 5 %( which was proved to be possible), the second car’s speed can be evaluated higher than the offender one. Reporting only one value as the highest speed by the radar system, the guiltless vehicle will be penalized unfairly.
But in fact there are radar systems of which the module reports several values for all the vehicles in the scene, or even determine the positions of them. These types of systems do not need to read all the license plates for the process of matching up the declared speeds to the cars in the image to be done correctly. That’s why the radar instant speedometer won’t be inaccurate even with errors in LPR.
Radar speedometers strengths
Obviously using radar modules in speedometer systems comes with more cost. So there must be considerable advantages and a logical reason to do so. Accuracy and stability in final results are the gifts of using radar systems which will be discussed in the following titles:
Accuracy of instantaneous speedometer
In order to measure the speed of the vehicles, Speed radar modules exploit a physical phenomenon in which environmental and light conditions have slight effect. the speed of the vehicle is calculated precisely regardless of type and the position of the plate or whether being read correctly or not, since frequency variations (Δf) can be measured accurately in electronics, theoretically high accuracy is expected for radar systems (unlike mono-cam LPR based speedometer, for which theoretically a high amount of erroneous was proved).
It must be noted that there are problems with radar systems too such as undesirable reflections, forming virtual targets or multiple unreal bodies instead of one real huge object which all can be dissolved greatly by utilizing signal processing and secondary analysis. In other words, each radar module does not have insured performance only by being a radar system and a complementary knowledge is needed also (in order to improve the radar raw data), so that the signal processing unit and software filters be applied on the raw data. That’s when more reliable results will be achieved.
Resistance against slight variances in angle
In previous section, about mono-cam LPR based speedometer, we saw that even a slight change in setup angle of the camera will be destructive to speedometer results. And also we saw that angle variation is inevitable due to changes of temperature, foundation subsidence, joints wearing out, blowing strong wind, passing heavy vehicles and other reasons.
But these changes are almost ineffective on the radar modules (if the system is multiple lanes) and system resists against these changes.
LPR independent mechanism in vehicle detection
Radars detect cars and evaluate their speed without using LPR mechanisms so none of the plate reading problems which are unavoidable due to many reasons will affect speedometer, traffic recording and imaging passing vehicles. For example, not all the installed license plates are standard ones, such that vehicles with politic plates, temporary license plates, transit and even in some border town register plates from neighbor countries (which follow no standard unlike Iran) traffic legally. And if vehicle detection is based on LPR (in day or night) offenders or even criminals can easily deceive the system by covering the registration plate. And more importantly, this must be mentioned that no LPR kernel is error proof due the nature of the problem itself. If vehicle detection is based on the LPR process, Inaccuracy of it will affect the speedometer performance. Also if the vehicle is detected and its speed is calculated by any mechanism other than LPR, only one frame will be sufficient for ANPR, therefore if LPR was not able to read the plate in several plates, one frame would be sufficient for system final performance.
Meanwhile systems in which vehicle detection is done separated from LPR process are able to detect all the cases mentioned and record them alongside their speed and clear picture. This issue in terms of traffic management, traffic counting and security matters is as important as or even more important than speedometer.
High amount of data for a vehicle
As discussed earlier, LPR cameras cover a rage of 10-15 meters. But radar sensors can detect vehicles from a distance of more than 100 meters, so there will be more time and possibilities to record information about it.
In addition, the rate of valid data production in radar sensors (and 3-D image processing) is more than the frame rate of LPR systems. Thus there will be several times more data for each vehicle on the path. It is worth mentioning that radar produces the speed of vehicle in each datum using Doppler Effect, so each of them would be valid solely. So in case of there being any noise, it can be detected and eliminated. For example, when we have calculated the speed of a vehicle for 200 times and 195 of them has the same value, our result is more reliable than outcome from a mono-cam LPR based system; in which we have only a few data to work with.
Weaknesses of radar systems
There are weakness and strengths for every technology, which both must be considered jointly for having a fair critique. Although radar modules provide more accuracy and stability in calculating instance velocity, but there are also conditions in which they do not have thorough performance and their defect will be revealed.
Resolution under high traffic conditions:
 Generally, first generation of radars (which are wide-spread through our country along with photography camera) detect only one car and are incapable of separating, thus it is only multi target radar which has enough resolution to detect several vehicles and report the speed of each separately. The next generation of radars detects vehicles upon frequency variation caused by Doppler Effect. Thus when the street is not crowded and a few vehicles are passing with significant speed, radar can detect them appropriately and reports speed of each accurately. But suppose the street is filled with cars driving at low speed, or even they stop and go consecutively, so there is little space between them, in such a situation system is not able to distinguish all the vehicles from other reflecting surfaces, and some of the may remain hidden. Generally, radar technology has good performance in instantaneous speedometer, but limited resolution. There has been enhancement in traffic radars’ speedometer accuracy for many years, yet improving their resolution is still a major issue in this industry. Every year companies present new products in which the resolution has improved.
Generally, first generation of radars (which are wide-spread through our country along with photography camera) detect only one car and are incapable of separating, thus it is only multi target radar which has enough resolution to detect several vehicles and report the speed of each separately. The next generation of radars detects vehicles upon frequency variation caused by Doppler Effect. Thus when the street is not crowded and a few vehicles are passing with significant speed, radar can detect them appropriately and reports speed of each accurately. But suppose the street is filled with cars driving at low speed, or even they stop and go consecutively, so there is little space between them, in such a situation system is not able to distinguish all the vehicles from other reflecting surfaces, and some of the may remain hidden. Generally, radar technology has good performance in instantaneous speedometer, but limited resolution. There has been enhancement in traffic radars’ speedometer accuracy for many years, yet improving their resolution is still a major issue in this industry. Every year companies present new products in which the resolution has improved.Generally, utilizing array sensors is the strategy to enhance the resolution. This causes radar sensors become larger or requires several sensors set for a system.
Vehicle weight classification
Radar sensors are able to classify the vehicles using the electromagnetic reflection level of them. But this is not much possible in practice as reflection level of objects’ surface is not only depending on their size and factors mentioning below are also involved:
The aerodynamic shape of vehicles
A vehicle with smooth surface and sharp edges has different reflection from one with curved surface. This effect is so important that anti-radar planes are designed with smooth surfaces and sharp edges.

Smooth surfaces and sharp edges in anti-radar planes
Setup environmental conditions and radiation and reflection angle of electromagnetic wave
The magnitude of the received wave is influenced by the angle in which the radar is installed respect to the street and also this fact that whether the major reflection comes from the front surface of the vehicle or the sides.
Color and reflection coefficient of the cars surface
In order to be reflected from the surface of the car, electromagnetic wave must pass through the color of the body and the infrastructure of it which in turn has absorption effect. Thus the amount of absorption can change reflection rate.
Glass to metal ratio of the vehicle’s body
Effective reflection comes from the metal used in body of the vehicle, so the rate of metal to glass used in the body will also affect the final reflation.
Heavy vehicles detection
As we said radars work based on the caused frequency shift, but this method sometimes results in some errors:
Detecting a heavy vehicle as two light ones
Sometimes radar sensors recognize heavy vehicles (e.g. tanker trucks) as two light cars (moving in line), this occurs more often in higher speeds where fewer data is received about the vehicles.
Detecting two light vehicles with the same speed as a heavy vehicle
It is also possible for the radar to recognize two light vehicles moving close to each other with the same speed as one heavy target. Sometimes system cannot distinguish them.
Lane detection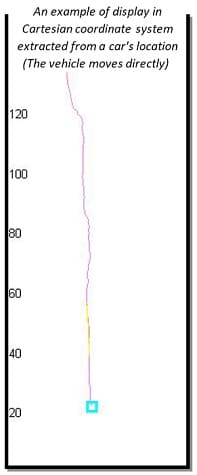
Radars from higher generations are able to represent the position of the targets in polar coordinate (using distance and angle of the targets). But exploiting this data is done through calculating phase variation and delay time (between signal being sent and received again) for every single element of the radar’s sensor array. Due to size limitations, these differences in time and phase are so slight, which leads to accuracy of 3-D location detection of the body to decrease. If the output data of the radar is plotted in Cartesian coordinates, the path of the target will be drawn as zigzag line which illustrates error in locating the body. It is worth mentioning that since values of speed come from Doppler Effect (which is independent of location) not by derivation of displacement, they are still accurate. That’s how the inaccuracy in locating targets affects lane recognition.
Possibility of causing disorder in system by offenders
There are some devices which can be installed on the vehicle and they are able to affect the performance of the radar systems. This is done in two ways:
- Detector: alerting the driver when a radar camera speedometer is near
- Jammer: disturbing the radar system’s function
First types are devices which are sensitive to radar wave’s frequency. When these frequencies were detected in the environment they will inform the driver so that they can slow down before being recorded. But jammers are devices by which offenders and even criminals can disturb the performance of the system, consequently they can pass the system even without slowing down, without any record being registered for them or their speed can be recorded with wrong values. It is worth noting that although radar systems are not wide spread in Iran, these devices are already available.